答え合わせ 東海北陸地区編

鳥羽商船
公開資料なし。
鈴鹿
この大会のロボットに関する資料はありませんでしたが、開発環境・技術・素材についての資料が公開されていました。
メカロンやピーチにも、形状が出来あいのCFRP*1部品、3Dプリンタで任意の形に出力したABS樹脂(アクリロニトリル (Acrylonitrile)、ブタジエン (Butadiene)、スチレン (Styrene)共重合合成樹脂のこと)部品、そしてそれらや金属製部品を結合するための接着剤を積極的に使っているようです。これは見抜けませんでした。*2*3
豊田
この大会のロボットに関する資料はありませんでしたが、モータードライバーに関する基本的な技術資料が公開されていました。
MDの基本と応用について from 交流会 東海北陸ロボコン
私も現役時代、モータードライバーを先生達に教わりながら自作しましたが、何とも難しい部品だと思います。最近でも焼いてしまうチームはありました。
毎年、または長年開発しているのは、高専ロボコンのサイズ・重量向けで、カスタマイズが容易で、安いモータードライバー基本回路セットのような半完成品が存在していないからだと思っています。DC、BLDC、交流モーター、などなど動かすモーターとそのモータードライバーは色々あるでしょうが、大会テーマ・ルールが毎年異なる高専ロボコンではどれが主流か最適かは定まらないのも遠因でしょうか。ところで、今回の第28回大会でBLDC(brushless direct current motor)を採用していたチームはあったんでしょうか?
沼津
公開資料なし。
岐阜
OBRÓT
資料が公開されていました。口頭説明専用のスライドのようです。スライドだけでは得られない情報があるようです。
岐阜高専A-ロボット紹介 from 交流会 東海北陸ロボコン
マルチステアリングについて、おそらくですが、4輪から3輪にしたように感じます。ひょっとして減らしたのではないかというのはこのブログでもとりあげていました。*4その経緯の文章が添えられていて欲しかったです。
制御用コンピューターボードにはRaspberry Pi 2、そしてカメラにはそれ用のカメラ。無線通信には5GHz帯を利用するWifiルーターを採用したようです。5GHz帯にした理由を知りたいところです。
高専ロボコンファンとしては、岐阜高専の今年の操縦台についての解説も欲しかったです。歴代操縦台についての変遷も欲しいところです。
Quoits Zwei
資料が公開されていました。こちらも口頭説明専用のスライドのようです。スライドだけでは得られない情報があるようです。
岐阜高専B-ロボット紹介 from 交流会 東海北陸ロボコン
地区大会仕様と全国大会仕様、見かけが全く違うことに気づけませんでした。コントローラー手動操作部分もゲームパッドからジョイスティックに変更されていました。後日、記事も書き換えておきます。*5
コントローラーと制御機器の構成は想像とは若干異なり、ロボット側にもPCが搭載されていて中枢機器として機能しているとは思いませんでした。
無線通信には5GHz帯を利用するWifiルーターと子機を採用したようです。ひょっとしたら、Wifiダイレクト(ピア・ツー・ピア方式)ではないかとも思いましたが、Wifiルーターらしき画像がありましたので、違うと思います。また、5GHz帯にした理由を知りたいところです。

福井
Mr.イカフライ
公開資料なし。
福輪来
詳細な資料が公開されていませんが、学校訪問者用に製作されたロボット紹介パネルに幾つか情報がありました。
福井高専ロボット部 ブログ 2016/05/14(土) 13:38:39 公開の記事より
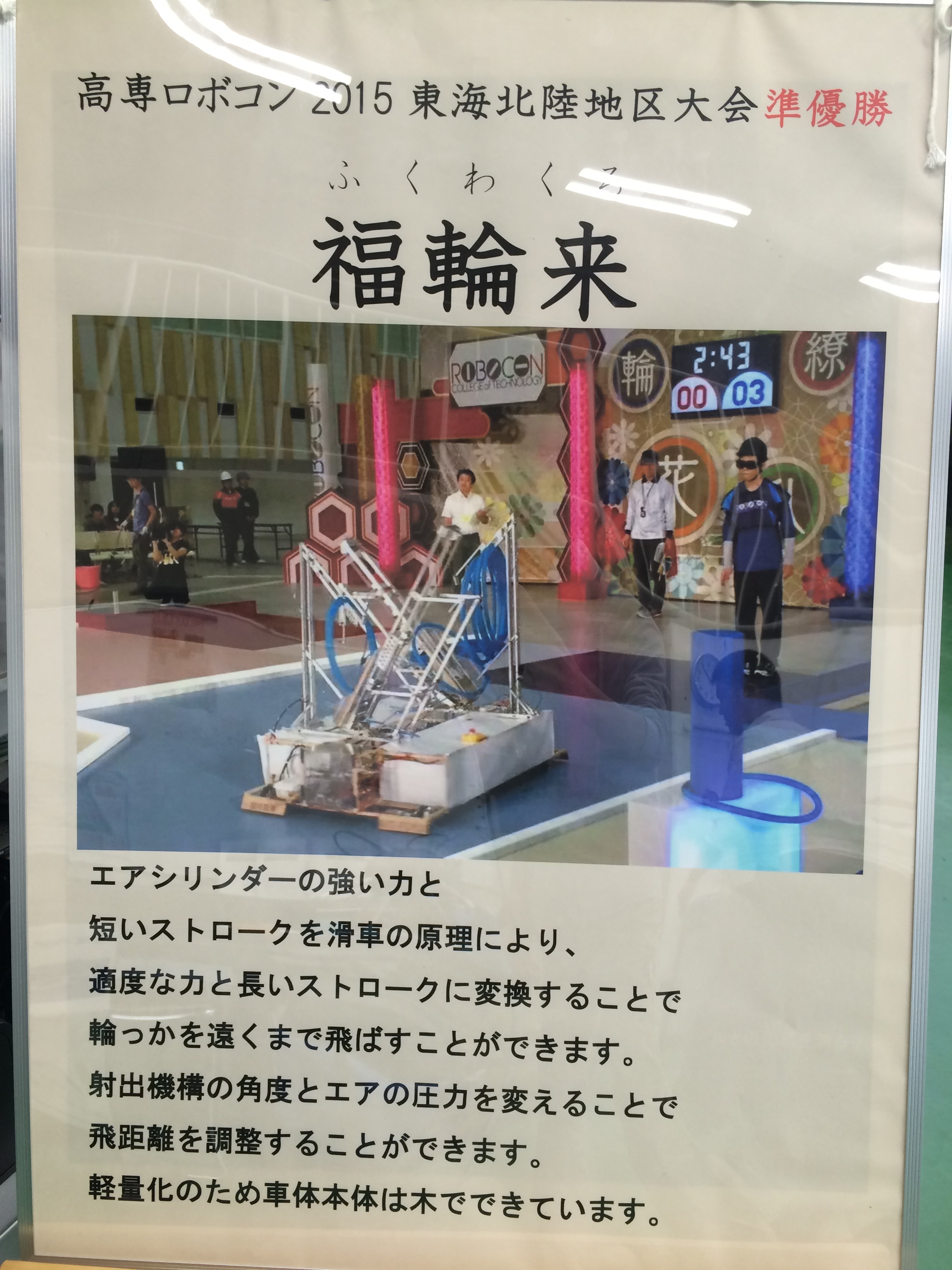
滑車を使って動作ストロークを長くしていることはわかりませんでした。圧縮空気の圧力を変えることができたそうですが、何段階に変更できたのでしょうか?
金沢
公開資料なし。
富山高専本郷キャンパス
HON50
資料が公開されていました。
4ローラーだったんですね。最初に輪に触れるローラーそれぞれをブラシレスモーター(合計2個)で回し、その回転を次のローラーにベルトで伝えていたそうです。ブラシレスモーターを採用し、モーターの回転数の調整ができたそうですが、、モーター制御回路はどのようなものだったのでしょう?
輪の装填装置は自動化されていたそうです。リミットスイッチによる機能実現は簡単で確実性が高いので重宝しますね。
中枢制御コンピューターボードにRaspberry Pi B+(2かな?)を採用していたとのこと。Raspberry Piにはセンサー等の計測値の収集と電磁ソレノイド信号の出力を担当させ、モータードライバーの制御にはRaspberry PiとはI2Cで連絡しているPICを利用していたそうです。そして、Raspberry Piと操作コントローラーとの間は2.4GHz帯の無線を利用していたそうです。Bluetoothなんでしょうか?また、Raspberry Pi用のソフトウェア開発言語は主にPythonを利用していたようです。
私個人的に思うのは、意外に高度なことをしていそうな感じがしました。
射輪士
公開資料なし。
石川
公開資料なし。
富山高専射水キャンパス
ドルフィンドール
機構や創意工夫に触れた簡単な解説の資料がありました。
弓コーン
公開資料なし。
自己採点
富山高専本郷キャンパスのHON50は意外でした。間違いだらけと言われかねないですが、 岐阜高専のQuoits Zweiのマルチステアリングについての指摘もしていたことから、及第点としたいです。