金沢高専B 飛花輪(ヒカリ)
試合内容
初戦は1回戦第2試合。鈴鹿高専Aチームの「ピーチ」と対戦した。テストランで1分32秒Vゴールを叩き出していた優勝候補筆頭であった。しかし、鈴鹿のピーチは試合が開始されても動かず、動いたと思ったら自陣ポールを2本に輪を入れはしたが停止、そしてリペア宣言。リペアして再スタートしても暴走していた。金沢の飛花輪はピーチが止まった38秒前後に追いつき2対2としたが、3本目に輪が入れられずにた。試合は同点のまま終了してし、勝敗は勝敗審査員判定で決することとなった。優勝候補の鈴鹿のピーチを優勢とし推した審査員は一人、金沢の飛花輪は二人、結果、金沢が勝ってしまった。
2回戦第6試合に福井高専Bチームの「福輪来(フクワクル)」と対戦した。福井は初戦であったが順調に得点を重ね、中央ポール3本全てにも輪を入れていた一方で、金沢の飛花輪は初戦よりも調子を落として自陣ポール1本しか入れられず、1対6で負けてしまった。
上記サイトの都合で画像が閲覧できないことがあります。
特徴
- 移動システム:三輪オムニホイール+二輪補助輪
- 射出エネルギー源と格納方法1:金属製引張コイルバネ
- 射出装置1:バネ引張弾性利用カタパルト(パンタグラフタイプ)(自陣)x3
- 射出装置2:バネ引張弾性利用カタパルト(パンタグラフタイプ)(中央・相手陣)x1
- 照準/測位システム:なし
- 通信システム:未確認
- コントローラー:ゲームパッド
- 操縦者:1名
- 自律機能/自動機能:未確認
- 妨害装置:なし
射出装置
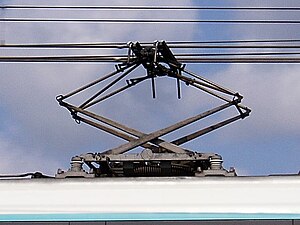
124チーム中、パンタグラフの可動を応用した射出機構を採用したのは、金沢高専の飛花輪と 広島商船高専の「ヘリアンサーS(ヘリアンサーエス)」だけである。どちらも、下枠交差型という前世紀の新幹線などで採用されていたパンタグラフに似た構造のものを2段または3段結合させた構造をしている。結合させたものを、日本では一般にマジックハンド、英語圏では"lazy tongs"と呼ぶ。
下枠交差形パンタグラフ
出典:ウィキペディアの執筆者. “集電装置”. ウィキペディア日本語版. 2016-03-30. https://ja.wikipedia.org/w/index.php?title=%E9%9B%86%E9%9B%BB%E8%A3%85%E7%BD%AE&oldid=59160801, (参照 2016-04-02).
出典:(下記のサイトでは507種類もの機械がHTML5を駆使したアニメーション画像と簡単な説明で紹介されています)
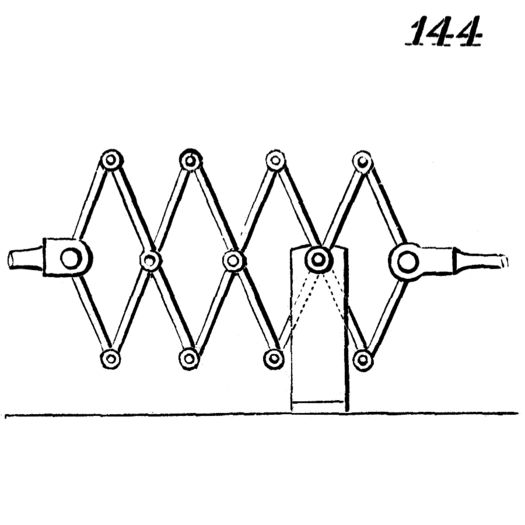
金沢の飛花輪はその機構を採用している装置が合計4つもあり、交差しているクロスリンクの数が3つの自陣ポール用射出機構が3つ、クロスリンクが4つの中央・相手陣ポール用が1つ搭載されている。台車の形から、中央・相手陣ポール用の射出装置はもう2つ搭載されていても不思議には思わない。*1
射出装置のマジックハンド機構を伸ばすための動力源として金属製の引張コイルバネが採用されている。二つのクロスリンクを結合している向かい合った二つの関節にバネを渡し、そのバネを引っ張るようにマジックハンドを畳んで装填準備しておき、フックが外れると同時にバネが関節を近づけるように引張り、マジックハンドが伸びていく勢いで輪を飛ばしている。輪に触れる部分のリンクは延長されており、マジックハンドが伸びると延長されているリンクの、どこでもよいが、先端の軌跡は楕円曲線となる。なお、楕円を描く様子をオンラインの動的幾何ソフトで再現したかったが時間の無かったので後日挑戦してみるつもりである。*2
追記
GeoGebra上でマジックハンドっぽいものを作図してみた。スライダーを使ってうごかせる。また、スライダーは自動で振幅してくれる。
軌跡を描かせれば、幾つかの点は、その軌跡が楕円であることが確認できるだろう。初等な数学を使っての証明はまた後日に行うつもりである。
magic hand(lazy tongs) 4 links - GeoGebraTube
参考:
見逃すところだったが、飛花輪のパンタグラフ機構は、一般的なテーブルリフト(シザーリフト?)や油圧ジャッキのように上部の水平または傾斜角が保たれまま伸びるのではなく、最初は射出方向とは正反対に傾いていて、パンタグラフ構造が伸びると同時に射出方向に傾くように設計されている。出場校データチェックのページの説明にあるとおり、砲丸を投擲する腕のように輪を放つ。これは、詳しく構造が分からなかったのだが、マジックハンド部分下部のリンクが通常とは異なる構造となっていて、テーブルリフトのようなスライダーリンクは採用していないのかもしれない。設計者のコメントを待とう。*3
パンタグラフ、マジックハンドのような構造は、最先端機器から身近な機器まで、実はかなり使われている機械要素である。例を挙げれば、先の電車のパンタグラフを筆頭に、人工衛星の伸張ブーム、テーブルリフトや油圧ジャッキ、そしてノートPCなどの薄型キーボードのキーを支える構造などがあり、探せばもっとあるかもしれないが、幅広く利用されている。高専ロボコンでもかなり昔から利用されてきた構造である。*4

{kind=link}